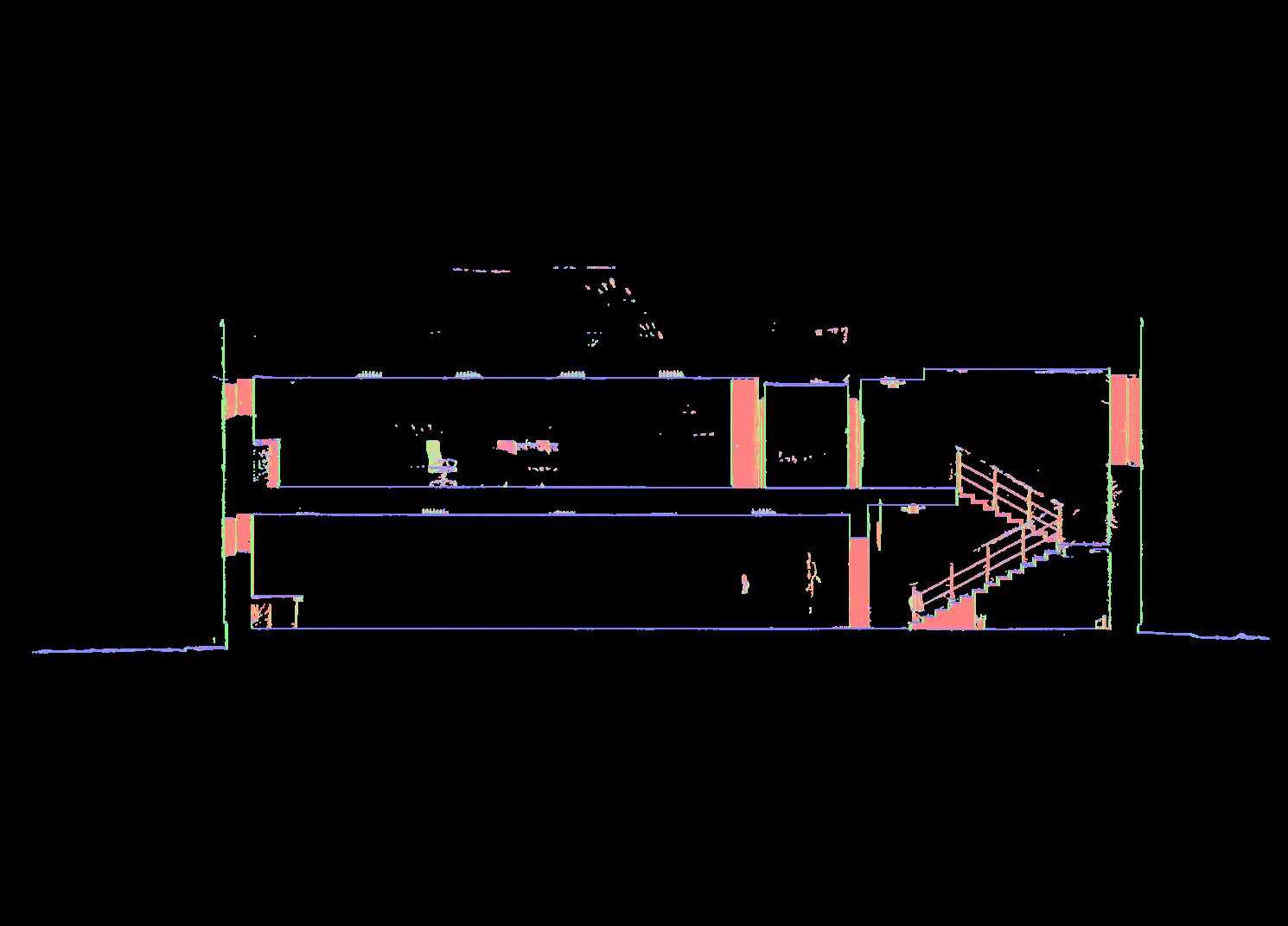
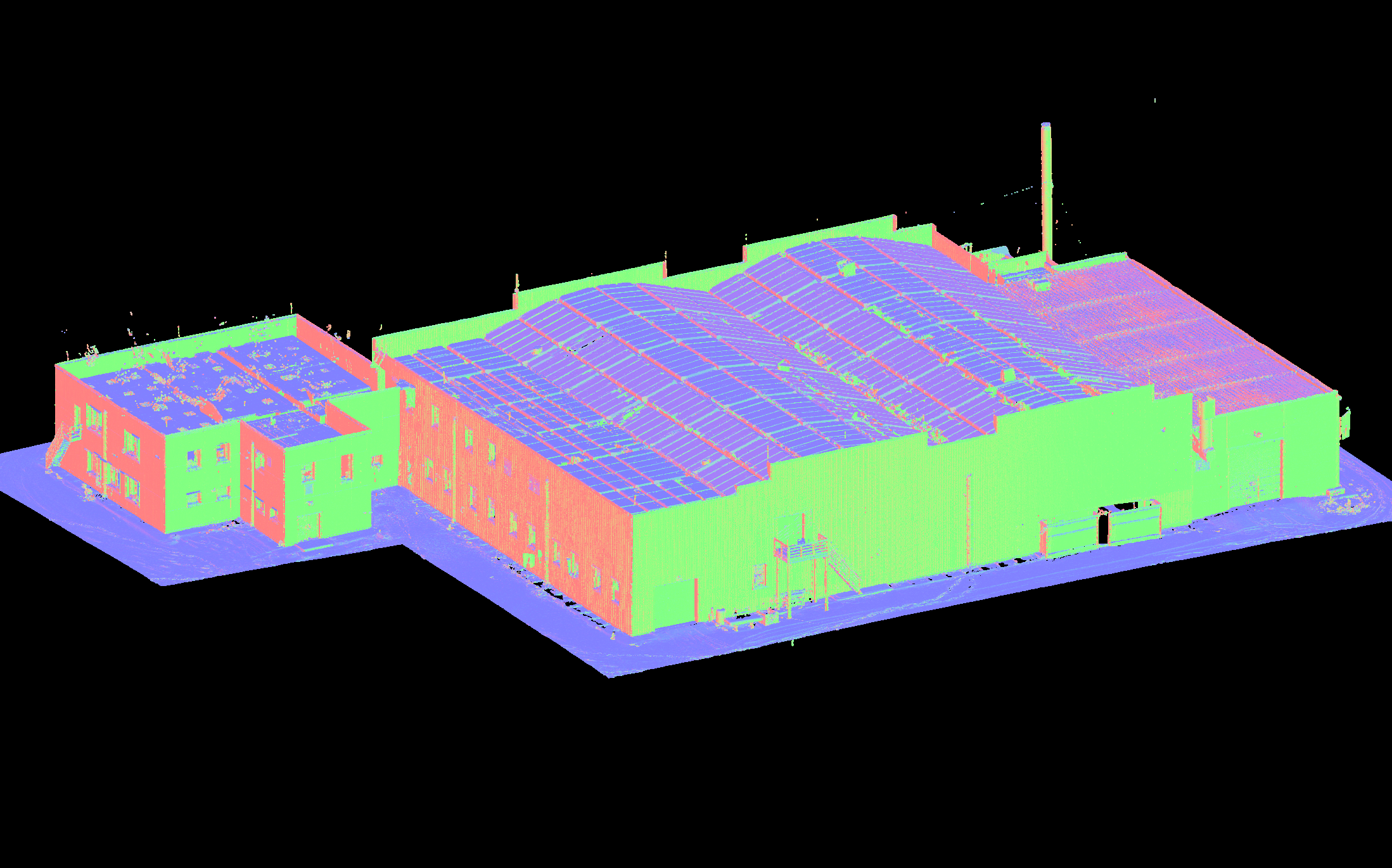
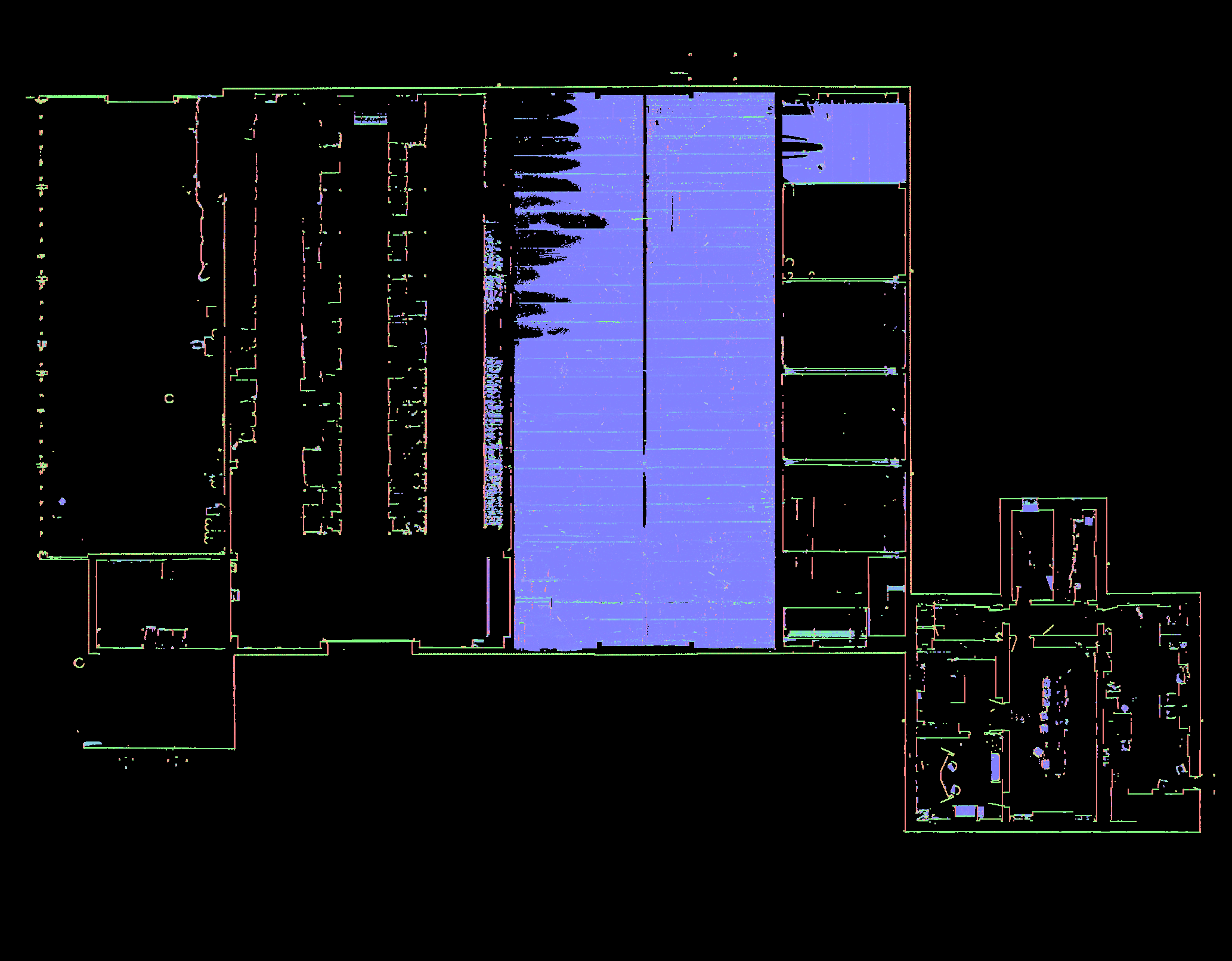
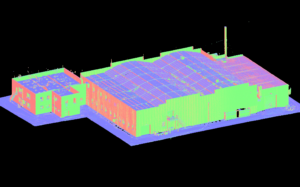
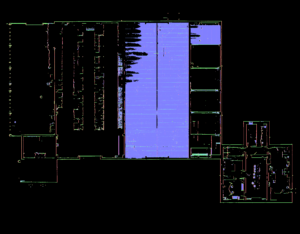
Scanning results in many different pointclouds. By adding them up we get a three-dimensional image of the object, where every point is described by three-dimensional coordinates. We get pointclouds by laserscanning. Today, laser scanning is the most advanced measurement method. The result of scanning is a multitude of point clouds interconnected and it forms a spatial set of points in the shape of an object. Data is obtained by laser scanning. We use the latest generation FARO FOCUS S70 scanner.
The speed of scanning is influenced by the size of the object, capacity and shape of the spaces; scanning an empty storehouse takes less time than scanning a condo building. Equally important are furniture, industrial waste, scaffolding etc. The scanner can create both, black-white and colorful pointclouds. Black-white mode takes less time, but a colorful pointcloud is more informative when we need data about the colour and texture of the object. Black-white mode scans objects with a large area a lot more quikly and it is enough for creating 2D drawings. These factors also affect modelling. Accoring to the customers’ needs we clean the pointclouds of unnecessary information, making it easier for the architects, designers and developers.
We use ReCap for registering pointclouds. It is a coin-operted Autodesk program. Most Autodesk products, AutoCad, Revit, 3ds max, support loading pointclouds as a background. That function is supperted by other designing programs for example Archicad.